Hola, hoy vamos a hablar de los SERVOMOTORES, en el mundo del hobby, la mecatronica, electrónica, radio control y robotica se encuentras estos peculiares componentes, que sirven para moverlos en un ángulo determinado que podrá ser calculado por el usuario, mediante algún sensor y en el caso del radio control por los joysticks.
Unas de las preguntas que algunos se realizan es.
¿Cuál es la diferencia de un motor de DC?
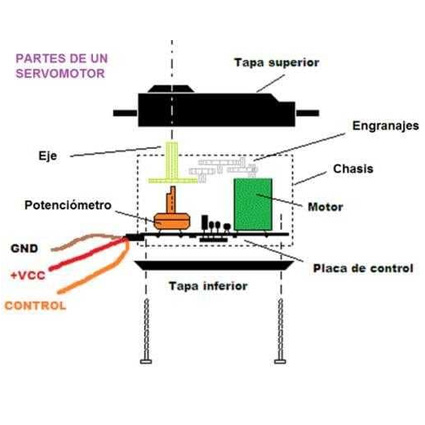
La respuesta es que en realidad no hay mucha diferencia, ya que dicho componente contiene en su interior un motor de DC(CORRIENTE CONTINUA), lo que lo hace «especial» es el sistema de engranes, el cual se abordará más adelante y su tarjeta lógica, la cual es la encargada de determinar su posición, dentro de este sistema se encuentra un potenciometro, el cual es el responsable de determinar el ángulo que se requiere ya que al girar el motor su resistencia interna sube o baja lo que se interpreta con ángulos desde 0 a 180° y en casos especiales de 0 a 360°, lo más usual son de 0 a 180° una vez que tenemos claro que el encargado de «saber» cuál es el ángulo es el potenciómetro debes saber que dentro se encuentran una serie de engranes la cual es encargada de aumentar el torque del servomotor a lo que el fabricante especifique, de igual manera mediante estos engranes se lleva la posición hasta el potenciómetro.
Hasta aquí a grandes rasgos y me manera sencilla sabemos como trabaja un servomotor, pero surge otra duda…
¿Como lo programo?
Pará programarlo en este caso nos basaremos en una placa arduino, cabe mencionar que consta de 3 cables:
1.rojo que es la alimentación 5v
2.amarillo que es la señal que nos brinda la posición
3.un ground o tierra con la que cerramos el circuito
En arduino basta con usar la librería servo.h
Hagamos un ejemplo simple
#include
Servo servo1; //aquí creamos un objeto llamado servo1
void setup() //En esta parte irán declaradas todas las configuraciones de arduino
{
servo1.attach(9); //aquí indicamos que el servo está conectado al pin 9 (cable amarillo)
}
void loop()//Sección del código donde se estará ciclando infinitamente la rutina establecida
{
servo1.Write(90);// mandamos la orden de colocar el servo a 90°
delay(500);//esperamos 500 mili segundos
servo1.Write(180)
delay(500);
}
Con este código tu servo estará moviendose infinitamente de 90 a 180°
Pará finalizar las señales que utiliza el servo son señales PWM.
De las cuales se hablara más adelante.
Este componente lo puedes encontrar de venta con nosotros.
En sus diferentes versiones.